


Machine d'inspection sous vide
1.Avec un système d'inspection d'image développé indépendamment,
2. la vitesse maximale peut atteindre 1000 canettes/min.
3. Détection fiable et fonctionnement stable pendant longtemps Facile à installer et à utiliser
I. Aperçu de l'équipement
1. Nom du projet : Test d'étanchéité des produits remplis
2. Portée du test : fuites du produit rempli (fuite, joints manquants, joints en excès, bombement de la boîte)
3. Rendement maximal : 1 200 canettes/minute
4. Types de bouteilles applicables : canettes, canettes trois pièces, bouteilles en verre, bouchons métalliques et autres bouchons plats et magnétiques
II. Principe de détection
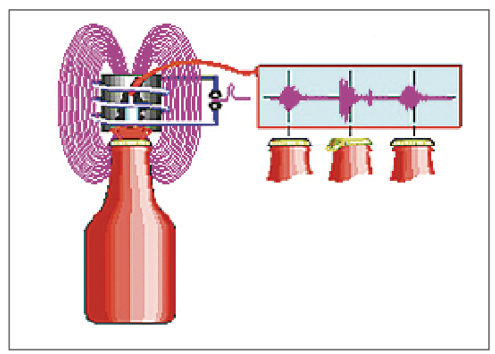
1. Grâce à la technologie des impulsions magnétiques (EMP), l'équipement génère instantanément une impulsion électromagnétique dirigée. Lorsque l'impulsion frappe la surface du bouchon, le champ magnétique fait vibrer le bouchon et génère un écho. Le dispositif d'acquisition sonore intégré à la sonde collecte l'écho et le transmet à un système de traitement pour analyse. En raison des différences de pression interne et externe, les produits étanches et non étanches présentent des signatures acoustiques différentes. Ce principe permet des tests d'étanchéité efficaces.

2. La technologie de balayage de surface utilise un balayage continu de la surface supérieure du bouchon de bouteille en verre. Si l'étanchéité est défectueuse ou si la pression interne de la bouteille est anormale, la surface du bouchon en verre change brusquement, ce qui permet de déterminer si l'étanchéité (ou la pression) du bouchon est correcte.
Processus de contrôle électrique
III. Caractéristiques de l'équipement :
Détection sans contact, vitesse d'inspection rapide et haute précision.
S'adapte automatiquement aux différentes vitesses de la ligne de production et effectue une inspection dynamique.
L'unité principale est conçue et fabriquée pour être étanche à l'air, à la buée et à l'eau, avec une forte adaptabilité environnementale.
La mise en œuvre du circuit matériel et un système d'exploitation intégré garantissent un fonctionnement stable à long terme.
Des alarmes sonores et visuelles simultanées sont activées et les conteneurs non qualifiés sont automatiquement rejetés.
Affichage chinois, écran LCD rétroéclairé par LED, texte clair et lumineux et fonctionnement d'interaction homme-ordinateur. Stockage de grande capacité, capable de stocker jusqu'à 10 types de produits, permettant aux utilisateurs de maîtriser le fonctionnement automatisé.
Rapport performances-prix élevé ; les composants clés sont tous importés de marques renommées, garantissant des performances stables et fiables.
Châssis et supports en acier inoxydable 304, avec protection industrielle jusqu'à IP65.
Utilise la technologie de détection et d'analyse du sonar sous-marin de l'institut de recherche océanographique.
Précision de détection :
| Non | Élément de détection | Conditions de détection et précision | Taux de rejet | Taux de faux coups de pied |
| 1 | Détection des fuites | -- -- | -- -- | < 0,03% |
| 1.1 | Pas de plafond | Pas de bouchon à vis | >99,99 % | < 0,001 % |
| 1.2 | Aucune détection de joint | Joint manquant | >99,9% | < 0,001 % |
| 1.3 | Double joint | Double joint de détection | >99,93% | < 0,03% |
| 1.4 | Détection des fuites d'air | Fuite de produit | >99,99 % | < 0,03% |
| 1.5 | Pots d'expansion et autres pots irréguliers | -- -- | >99,9% | < 0,03% |
Remarque : des fluctuations rapides de température peuvent affecter les résultats des tests et provoquer de faux rejets.
IV. Exigences d'installation
Cet équipement est installé sur une chaîne transporteuse horizontale à une rangée. Il comprend deux éléments : la détection et le rejet. La chaîne doit mesurer au moins 1,5 mètre de long (plus elle est longue, mieux c'est). Elle doit être maintenue aussi lisse que possible pendant le transport. Une inspection doit être effectuée après le refroidisseur. (Important)
1. Le matériau du couvercle doit être magnétique. Des couvercles provenant d'un même lot doivent être utilisés pendant la production. Mélanger des couvercles provenant de plusieurs lots peut réduire l'efficacité de la détection.
2. Alimentation : 220 V, 50 Hz CA, avec une consommation totale inférieure à 120 W. Veuillez nous informer à l’avance si la norme de tension de votre pays est différente.
3. Pour le rejet, il faut de l'air comprimé externe, avec une pression minimale de 4 bars et une pression maximale de 12 bars.




